行为树,英文是Behavior Tree,简称BT,是由行为节点组成的树状结构。行为树的每个节点都会返回一个状态,成功,失败,运行,父节点根据子节点的返回值做出相应的决策。在游戏开发中,行为树主要用来实现怪物AI的行为决策,根据条件以及环境来决定怪物执行什么样的行为,如攻击,逃跑,巡逻,休息等。
为什么使用行为树
怪物行为的控制一般来说有三种方法,
- 最简单的if-else嵌套。这种方法最直观,但是维护起来比较困难。
- 第二种方法是有限状态机。根据怪物当前所处的状态和当前的环境,决定状态如何迁移。当状态较多时,状态之间的迁移会比较复杂。而且增加状态时需要改动的地方很多。
- 行为树相对于前两种方式的优势在于,他实现了控制逻辑与行为逻辑的分离,控制逻辑就是行为树,行为逻辑则是各个行为节点。
对于游戏开发来说,我们可以让策划通过行为树编辑器来编辑行为树,程序只需要实现具体的行为节点,就可以实现行为决策。
组成部分
行为树的结构如图。
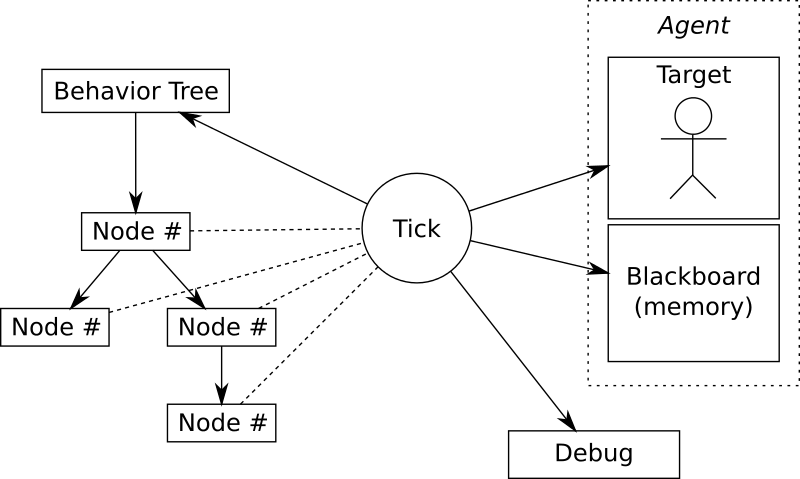
行为树有四种类型的节点,分别是
- 控制节点,最主要的是选择节点(Selector)和顺序节点(Sequence)。控制节点都不是叶子节点,它根据子节点的返回值返回成功,失败,运行这三种状态。
- 行为节点,具体的行为逻辑,如逃跑,巡逻。行为节点一般是叶子节点,返回成功,失败,运行这三种状态。
- 条件节点,叶子节点,返回成功,失败这两种状态。
- 装饰节点,非叶子节点,实现一些附加的逻辑。如取反。
每个执行AI的实体拥有一个Tick实例,这个实例保存了这个执行实体的状态参数,以及一个可读写的黑板。
黑板(blackboard)是行为树实现中用来存储变量,感知环境的一个概念,节点可以访问黑板来存取变量。
执行实体的数据可以直接写入黑板,而行为树节点的执行数据需要加上节点id写入黑板。
行为树一般以一定的频率周期性的执行tick函数,每次tick都从根节点开始执行。有一些行为树会直接从返回运行的节点开始执行,这样的话如果有低优先级的节点一直返回运行状态,
遇到高优先级的节点时则无法打断低优先级的节点。比如怪物在巡逻的时候返回运行,这时候如果有玩家攻击它,合理的反应是进行反击或者逃跑,但是如果每次tick都从巡逻节点开始执行,
则根本不会处理到反击或逃跑的逻辑。
具体实现
Erlang版行为树的具体实现参考了Behavior3的版本。每个节点的有5个回调函数。
- enter_cb 每次tick都会执行
- open_cb 只有未打开的节点会执行,如果节点有running状态,意味着节点处于running状态会跨越多个tick,然而只有打开节点的那个tick会执行该函数。
主要用来执行节点的初始化。比如移动节点设置目标点。等待节点用来设置开始时间等。 - tick_cb 节点的主逻辑。每个tick都会执行。
- close_cb 跟open_cb对应,只有结束节点的时候执行。意味着跨越多个tick的runing节点这个函数只会执行一次。一般用来关闭节点。
- exit_cb 每个tick都会执行。
1 | execute(#node{id = Id} = Node, #tick{blackboard = Blackboard} = Tick) -> |
选择节点priority,顺序执行子节点,如果子节点返回成功则返回成功,跳过后续子节点。
如果失败则继续执行后面的子节点,直到有节点返回成功或者运行为止。如果所有节点都失败,则返回失败。
如果子节点返回运行则该节点也返回运行。
如果需要记住上次运行的节点,下次直接从该运行子节点开始执行,可以使用mem_priority类型的节点。
如果子节点包含两个以上可能返回运行的子节点,则需要考虑是否使用mem_priority版本。
1 | priority([], Tick) -> |
顺序节点,顺序执行子节点,如果子节点返回失败则返回失败,跳过后续子节点。
如果子节点返回成功,则继续执行后续子节点,直到有节点返回失败或者运行为止。如果所有子节点都成功,则返回成功,
如果子节点返回运行,则该节点也返回运行。
类似mem_priority, 顺序节点也有一个mem_sequence节点,如果有两个以上子节点可能返回运行状态,则需要考虑是否使用mem_sequence.
比如,怪物执行巡逻,顺序节点有两个子节点,分别执行移动到A点,和移动到B点,那么必须使用mem_sequence,
每次tick从上次运行的地方继续运行。否则怪物只会在A点附近反复移动,无法移动到B点。
1 | sequence([], Tick) -> |
要注意的一个问题是,当出现高优先级的行为B1打断低优先级行为B2时,因为每次从根节点开始tick,B2的无法从内部正常的关闭。这时候需要在主逻辑上额外处理一下上上次打开的节点,
即调用一下这些节点的close函数。Behavior3的实现中通过比较本次的开放节点列表和上次的开放节点列表,找出上次开放,本次没有开放的节点来关闭,这样可能存在一个问题。
也就是当上次开放的节点在本次tick正常结束的情况下,仍然会被重新关闭一次,即一个节点关闭了两次。 Behavior3的实现就存在这样的bug。
解决的办法是,在判断节点是否需要关闭的时候,检测一下节点是否开放,如果是开放,则关闭,否则不予处理。
Erlang版本的实现中通过遍历行为树节点来找到未正常关闭的节点,考虑到行为树通常不会很大,性能上也可以接受。
遍历行为树关闭未能正常关闭的节点的实现:
1 | close_nodes(_, _, [], Tick) -> Tick; |